ART: Adaptive Relational Transformer for Pedestrian Trajectory Prediction with Temporal-Aware Relations
Ruochen Li, Ziyi Chang, Junyan Hu, Jiannan Li, Amir Atapour-Abarghouei and Hubert P. H. Shum
Proceedings of the 2026 IEEE International Conference on Human-Machine Systems (ICHMS), 2026
Abstract
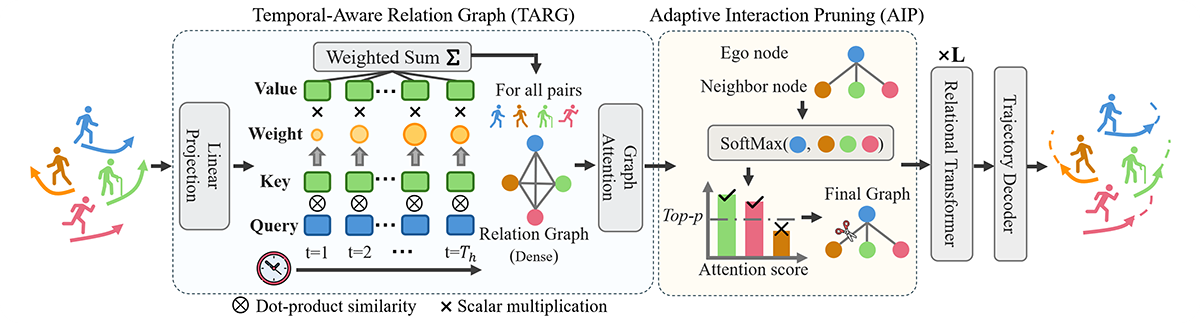
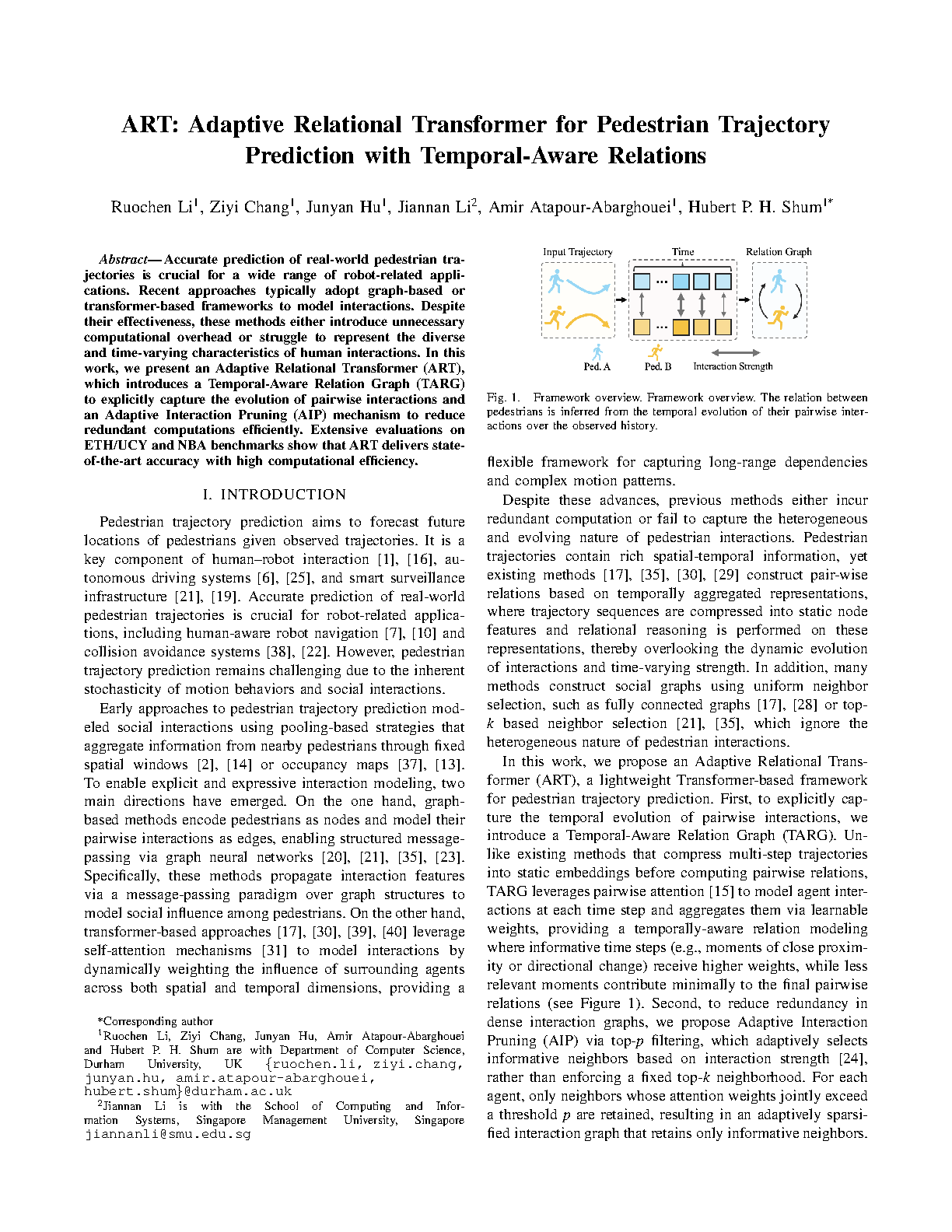
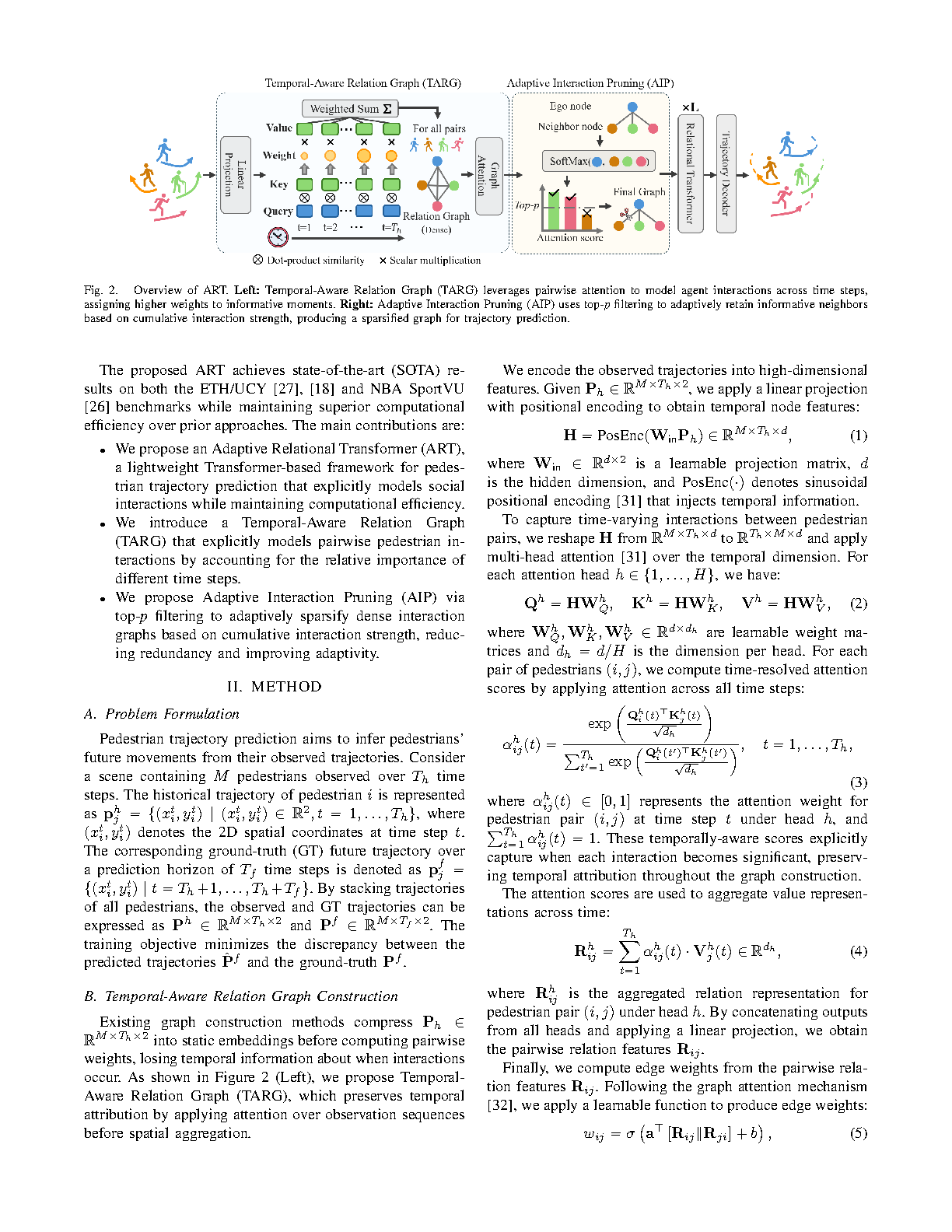
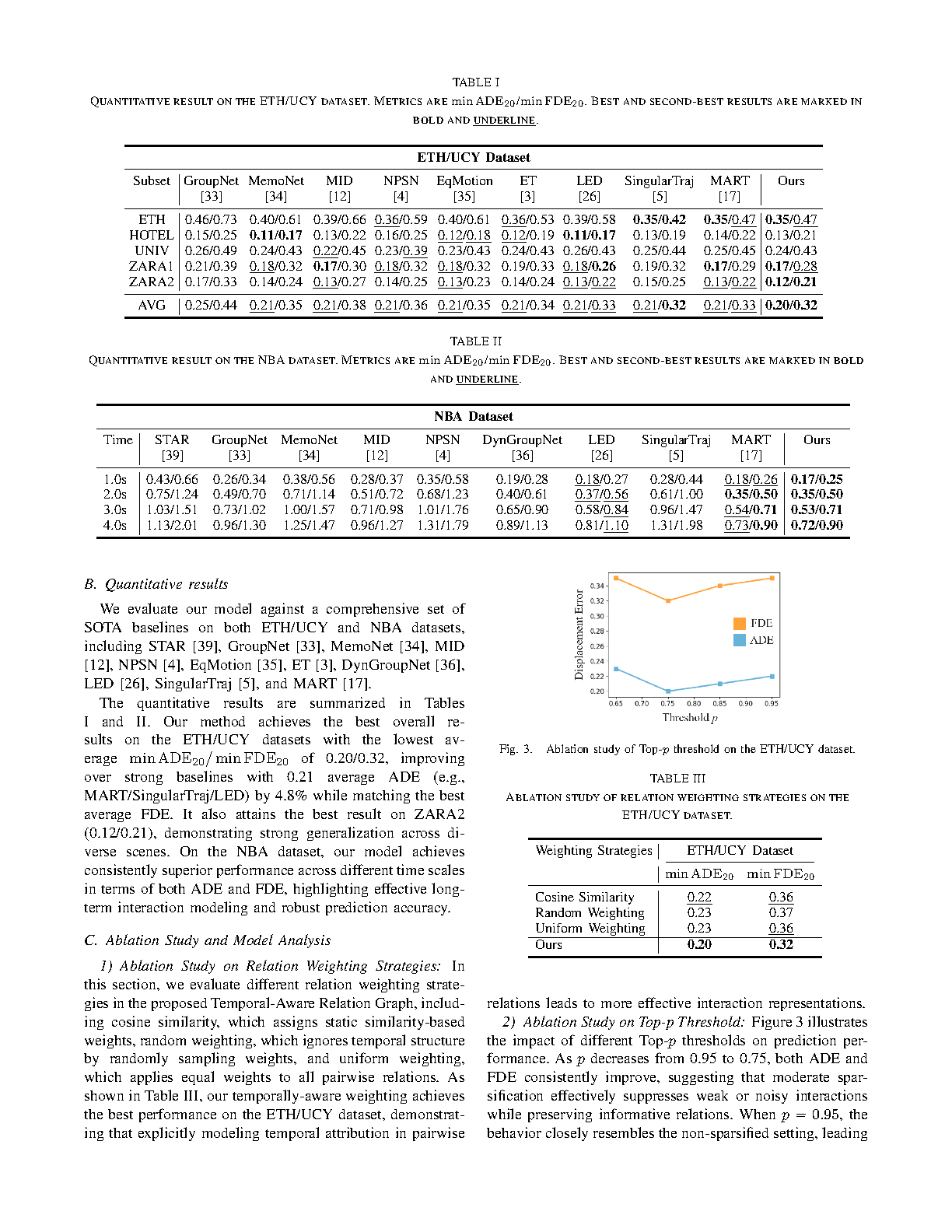
Accurate prediction of real-world pedestrian trajectories is crucial for a wide range of robot-related applications. Recent approaches typically adopt graph-based or transformer-based frameworks to model interactions. Despite their effectiveness, these methods either introduce unnecessary computational overhead or struggle to represent the diverse and time-varying characteristics of human interactions. In this work, we present an Adaptive Relational Transformer (ART), which introduces a Temporal-Aware Relation Graph (TARG) to explicitly capture the evolution of pairwise interactions and an Adaptive Interaction Pruning (AIP) mechanism to reduce redundant computations efficiently. Extensive evaluations on ETH/UCY and NBA benchmarks show that ART delivers state-of-the-art accuracy with high computational efficiency.





Cite This Research
Supporting Grants

Seedcorn Funding Singapore Management University and Durham University (Ref: 3787041): £15,000, Principal Investigator
Received from Singapore Management University/Durham University, Singapore/UK, 2025-2026
Project Page